For MIT’s Medical Device Design class, I worked in a team of seven to design a force-controlled automated massaging device that measures muscle stiffness in real-time.
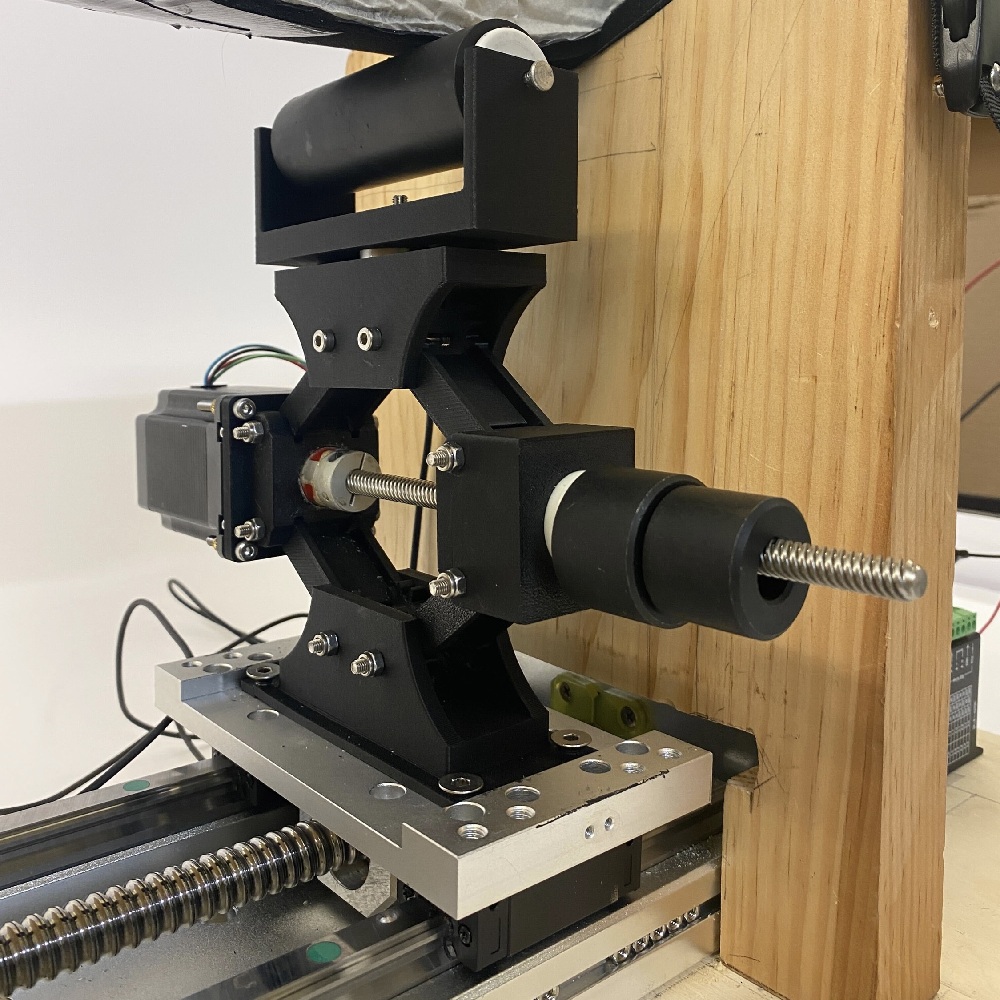
The device consists of three key components: a scissor lift-inspired mechanism that applies force onto the limb, a load cell that measures the force applied, and a linear stage that moves the stage along the limb. By measuring the force on the limb and knowing the distance pressed into the muscle, real-time muscle stiffness can be measured. Future iterations of this project will implement closed-loop stiffness feedback control, replicating how a clinician can feel muscle stiffness during a massage.
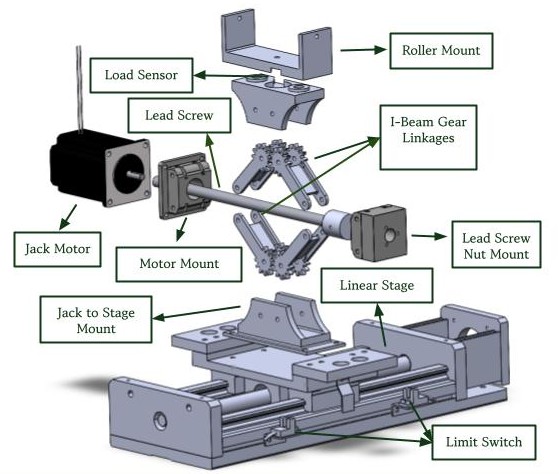
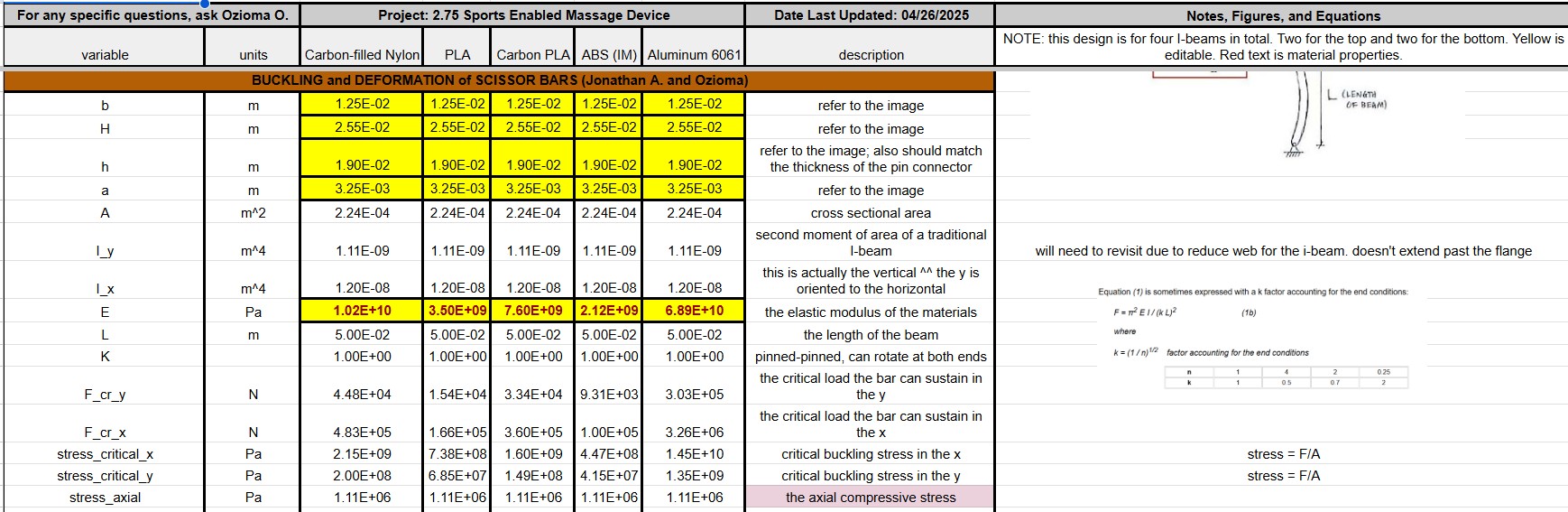
I was primarily responsible for the load analysis of the 3D-printed structure and the power transmission design. For the load analysis, I modeled the yeilding and buckling failure criterion using a spreadsheet to easily tabulate and communicate the calculations to teammates and project mentors. For the power transmission, I calculated the stepper motor torque and speed requirements needed to replicate the motion and force measured from a massage clinician. With these specifications, I chose sufficient stepper motors for the linear stage and scissor lift and desgned a mounting part to integrate the motors into the rest of the system while preventing a structural collapse when reaching holding torque. A sample of these calculations are shown below.